________________________________________________________________________________________________
Unless otherwise stated in the setup information for each part, all mechanical parts typically have the following main settings
Render Level:- ◦Set at 3, unless part is very large or on clear display (Axle, Engine)
Basic Settings:
- ◦Enable Crushability and set to 0.0
________________________________________________________________________________________________
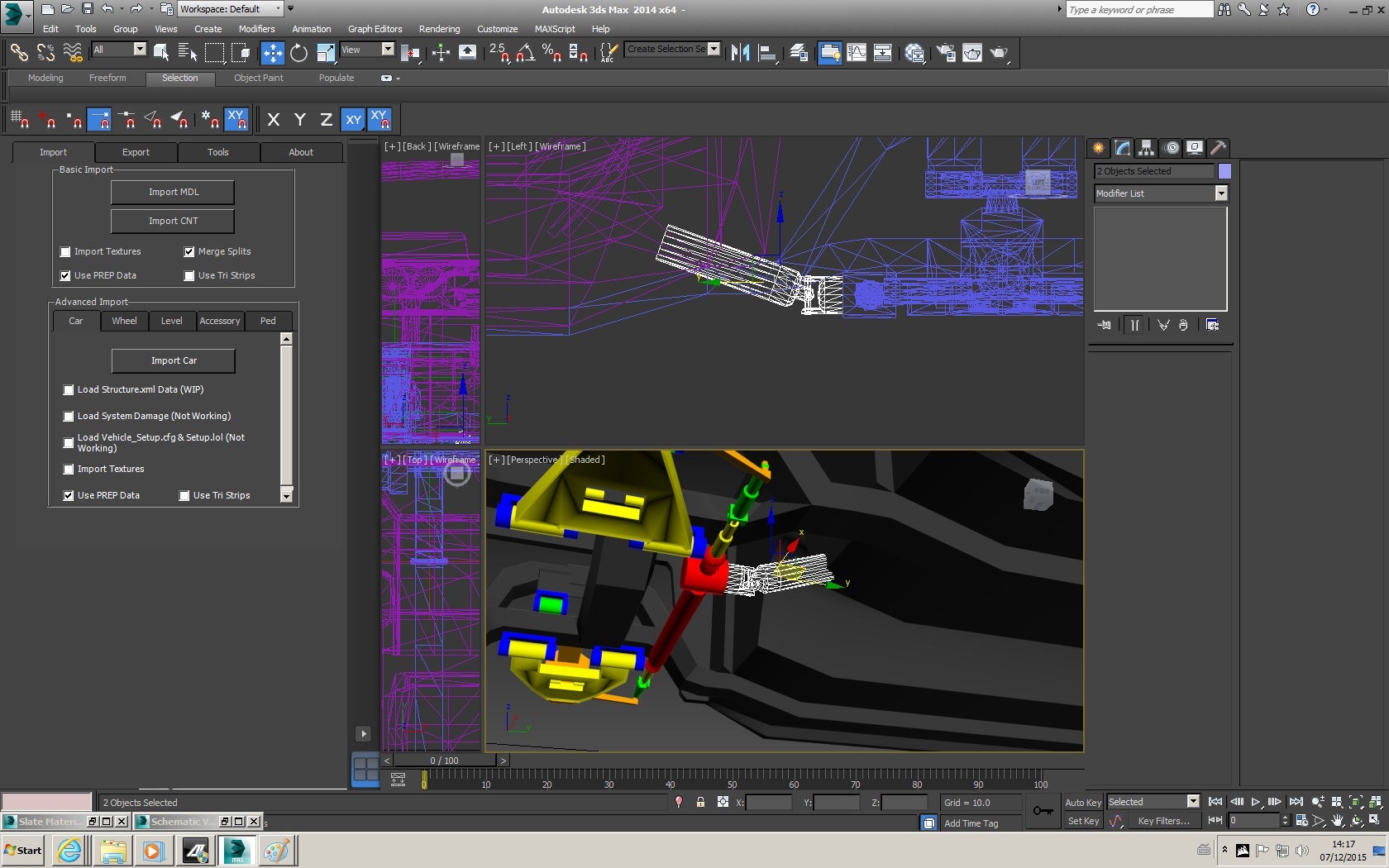
There are lots of options for visually animating the powertrain of a vehicle in Carmageddon Max Damage. To represent the transmission of power from either a Transmission or Transfer box, to a Differential (Live Axle or independent suspension), You will need three model parts.
____________________________
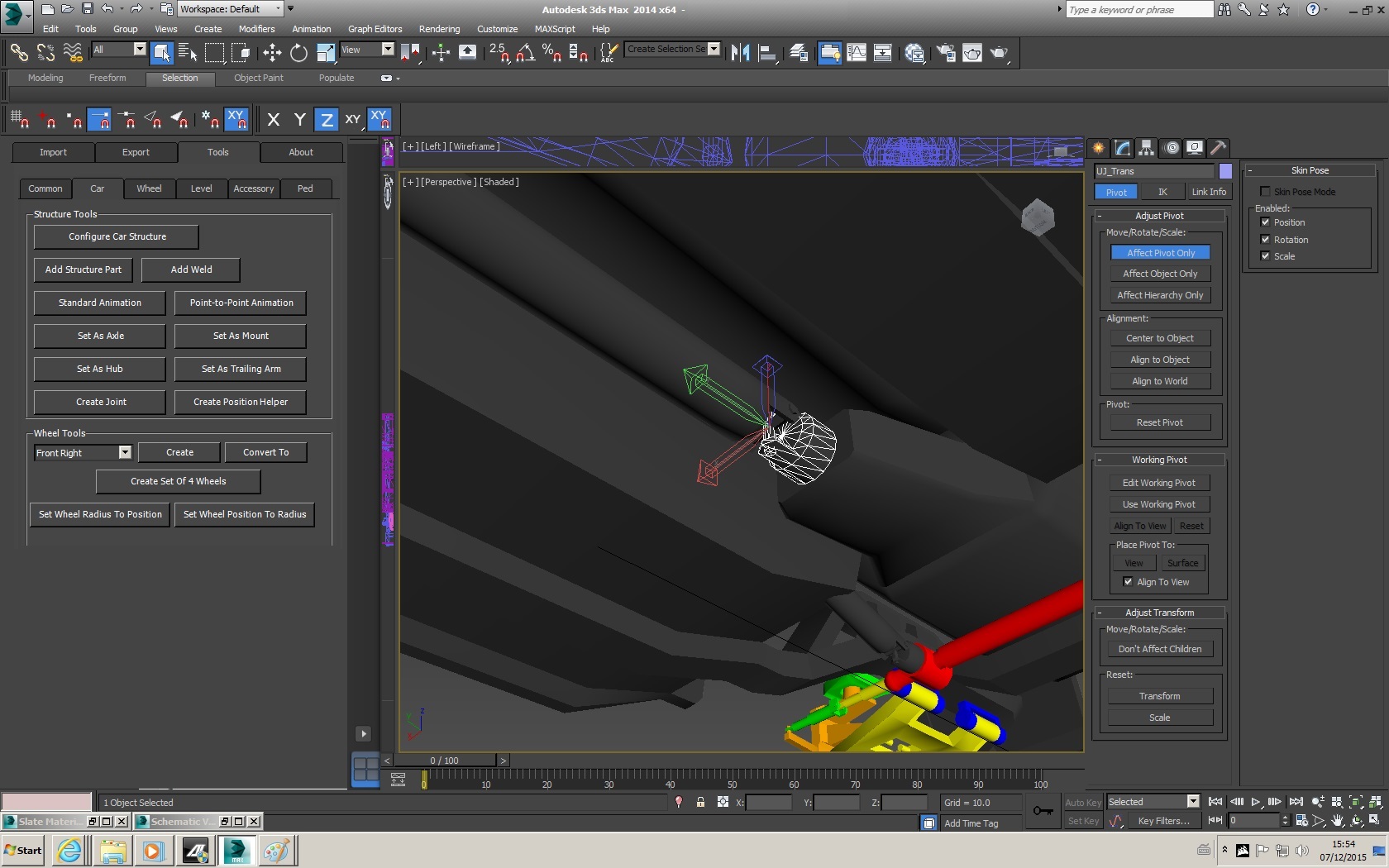
UJ (Transmission or Transfer Box)As covered in the Live Axle Tutorial, you will need a part representing a Universal-Joint/UJ, and this needs to be attached to your transmission or transfer box. Like below.
____________________________
UJ (Differential or Live Axle)As covered in the Live Axle Tutorial, you will need a part representing a Universal-Joint/UJ, and this needs to be attached to your Live Axle, or differential if you’ve modelled Double Wishbone or Macpherson Strut suspension. Like below.
____________________________
DriveshaftBridging the gap between both universal joints will be the driveshaft. Like below
____________________________
Typically, the UJ attached to the live axle or differential is parented & welded to that part. The UJ & Driveshaft attached to the Transmission or Transfer box are typically parented & welded to the Transmission or Transfer box.
Do NOT parent the driveshaft to the universal joint! Otherwise it will inherit any transformations applied to the UJ.
____________________________
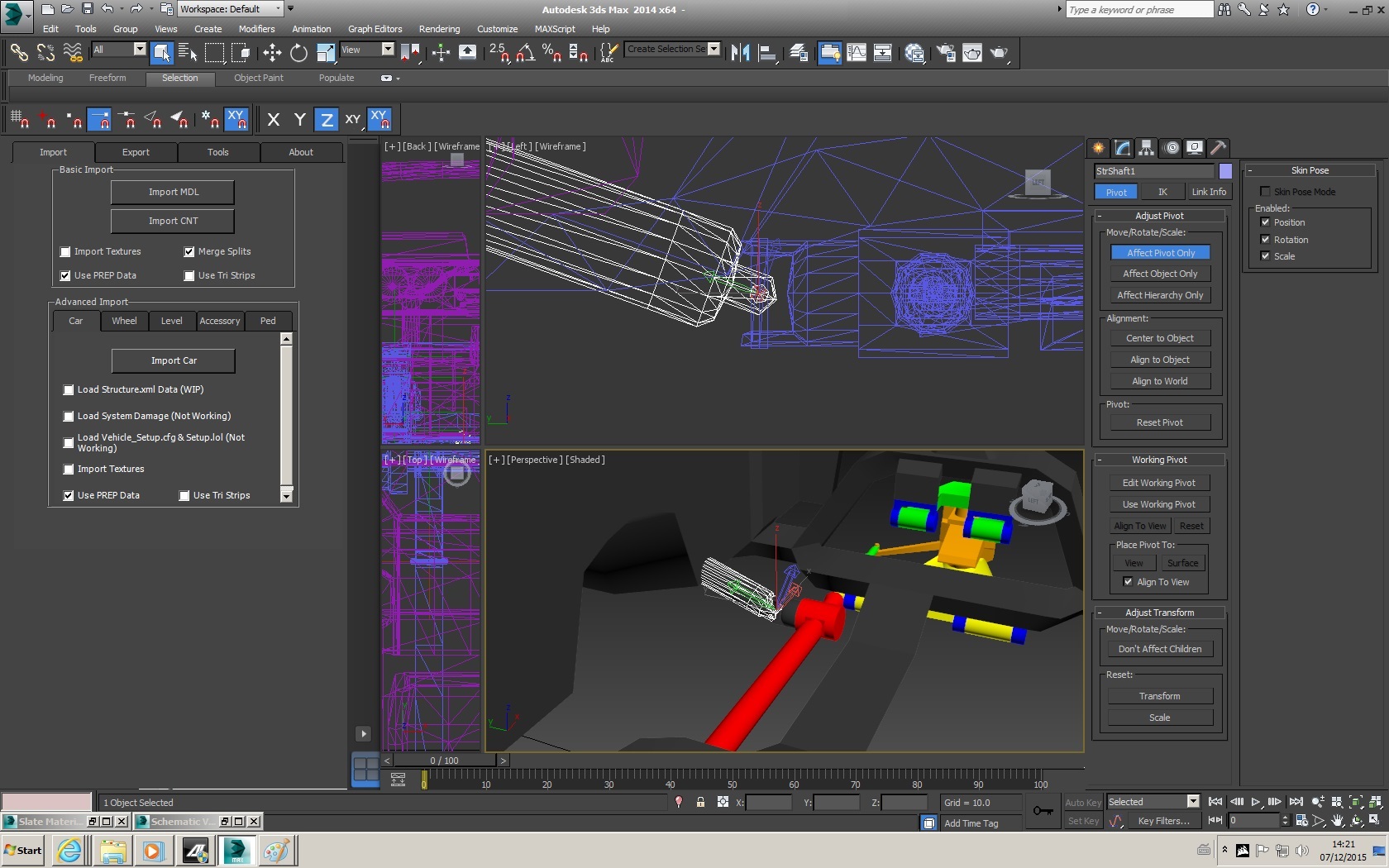
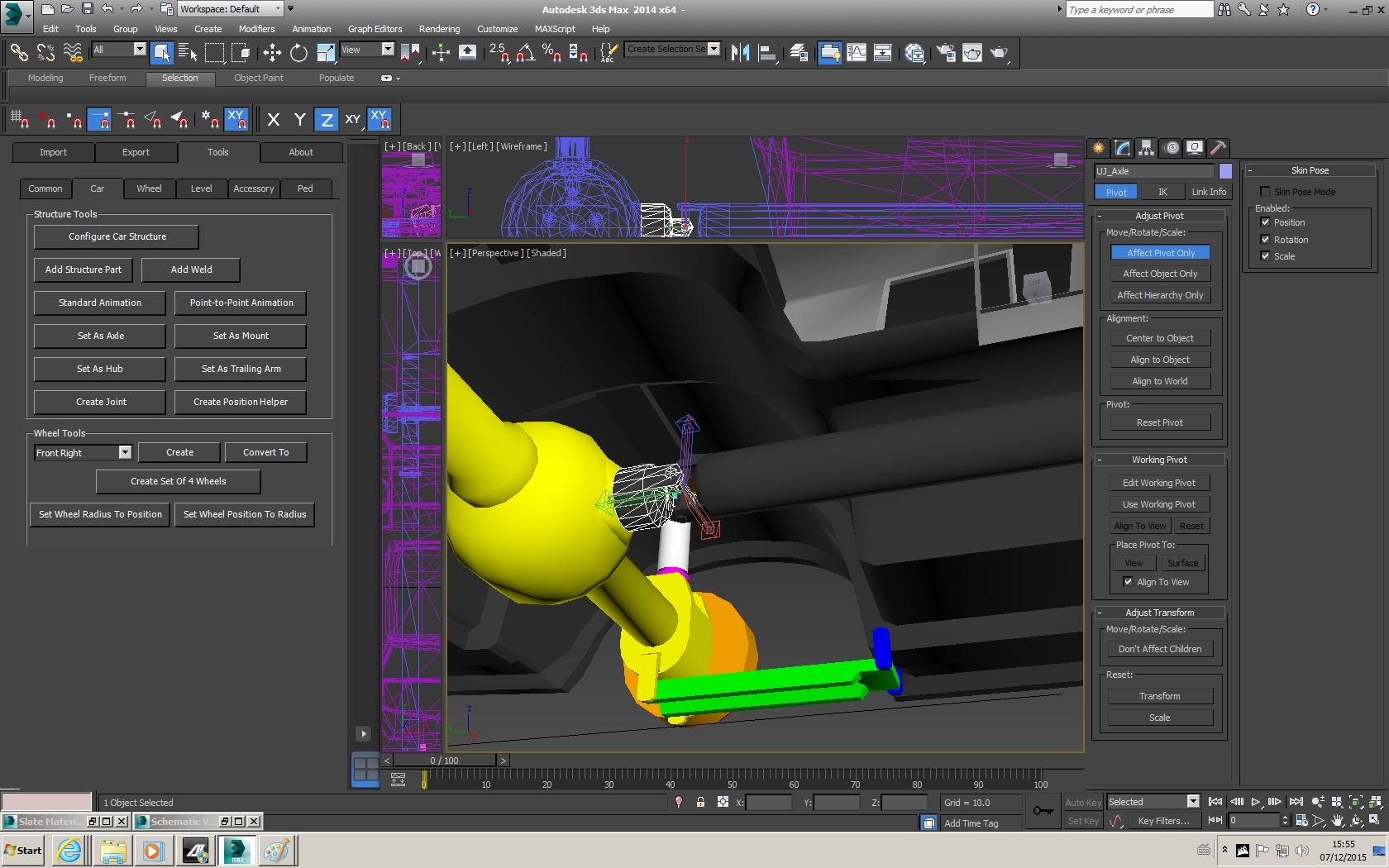
8-A-iii-1] UJ (Transmission or Transfer Box)Setting up a universal joint here is identical to the UJ setup mentioned in the Live Axle setup tutorial. The pivot point must be set to the centre of the shaft.
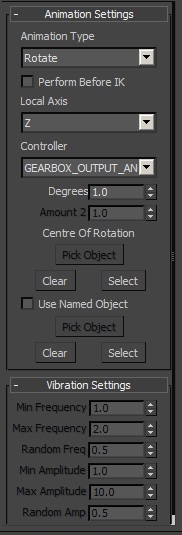
In addition to basic structure data, you will need to assign a ‘Standard Animation’ (accessed via ‘Tools’ -> ‘Car’). This will need to be set to rotate by 1 degree in the Local Z axis, using the ‘GEARBOX_OUTPUT_ANGLE’ animation controller.
Lastly, the UJ should be welded to its’ parent part. The weld vertex/vertices do NOT have to meet an actual vertex on the parent part.
____________________________
8-A-iii-2] UJ (Differential or Live Axle)Same as the setup process mentioned above.
____________________________
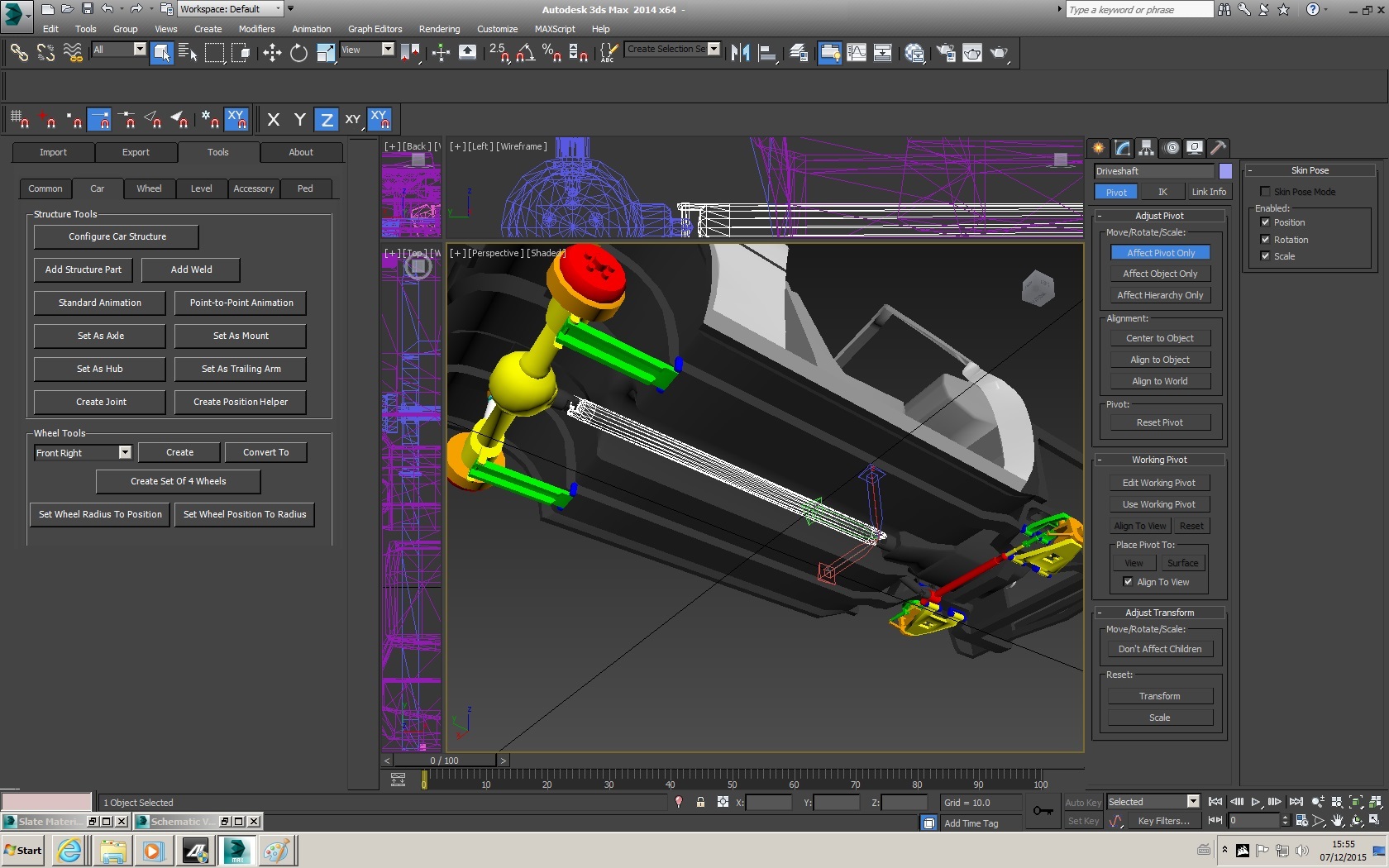
8-A-iii-3] DriveshaftSetting up the driveshaft requires everything mentioned in the setup for the universal joint/s mentioned above (including rotating the rotation in the local Z axis). It also requires the use of two ‘Point-to-Point Animations’ to get the driveshaft to rotate and stay with the Live Axle as the suspension compresses and rebounds.
It is very important that the driveshafts’ pivot-point is not just set at the centre of the shaft, but also at the point where it meets the universal joint, see below for reference.
You will need to place a position helper where the Driveshaft meets the UJ on the Transmission and another position helper where the Driveshaft meets the UJ on the Axle. See below for reference.
Next you will need two 'Point to Point Animations' (Accessed via ‘Tools -> ‘Car’).
‘SnapPointToPointOnOtherPart()’- ‘Point on This Part’ – Position Helper where the Driveshaft meets the UJ on the Transmission (Orange)
- ‘Other Object’ – UJ attached to transmission, or the transmission itself
- ‘Point on Other Part’- Position Helper where the Driveshaft meets the UJ on the Transmission (Orange)
‘RotatePointToPointOnOtherPart()’Don’t forget to change the animation type in the dropdown to Rotate instead of snap.- ‘Point on This Part’ – Position Helper where the Driveshaft meets the UJ on the Axle (Green)
- ‘Other Object’ – UJ attached to Axle, or the Axle itself
- ‘Point on Other Part’- Position Helper where the Driveshaft meets the UJ on the Axle (Green)
Pen ultimately. Add the same 'Standard Animation' applied earlier to both of the Universal-Joints/UJs
Lastly, the Driveshaft should be welded to its’ parent part (Transmission or transfer box). The weld vertex/vertices do NOT have to meet an actual vertex on the parent part.
________________________________________________________________________________________________
____________________________
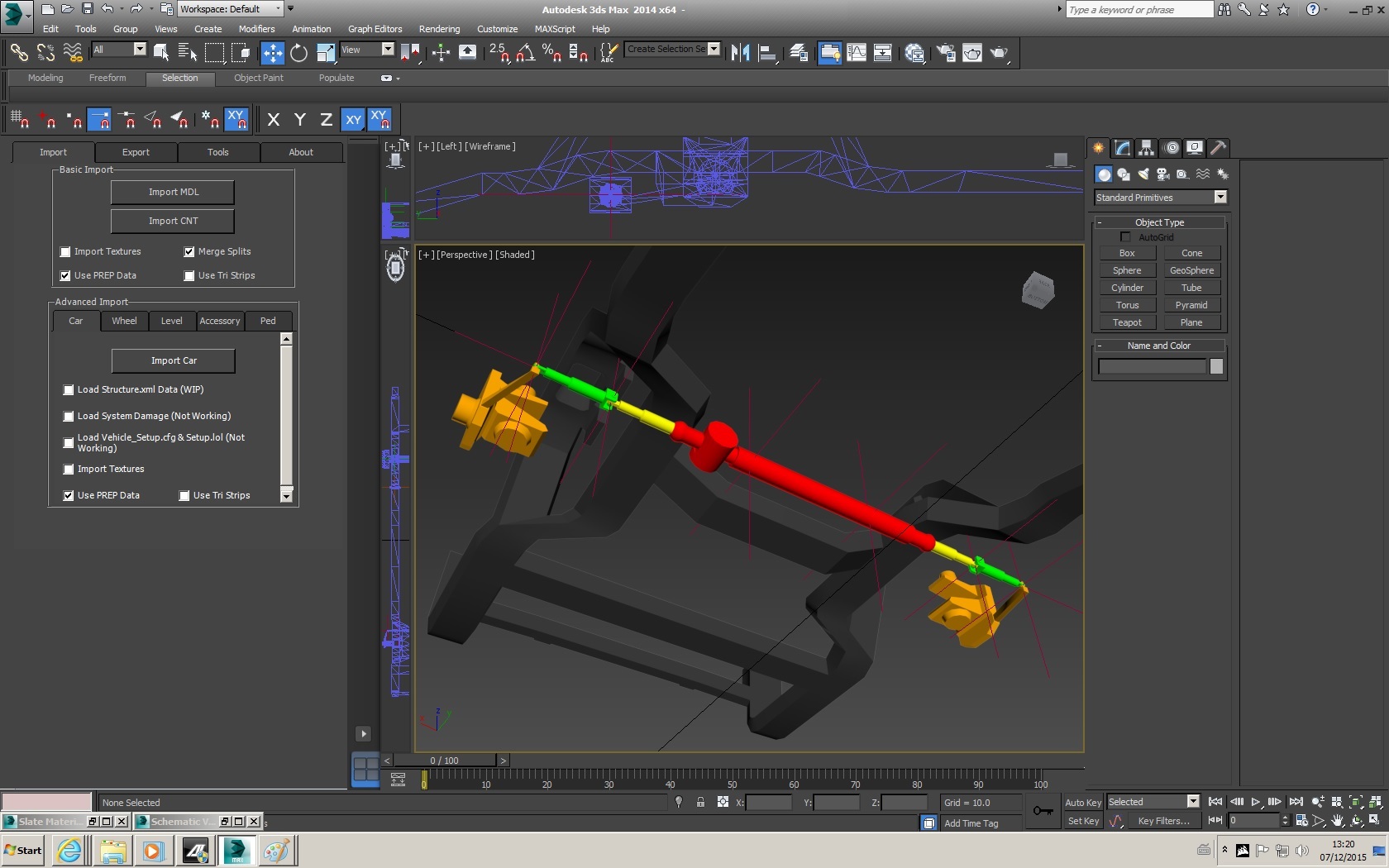
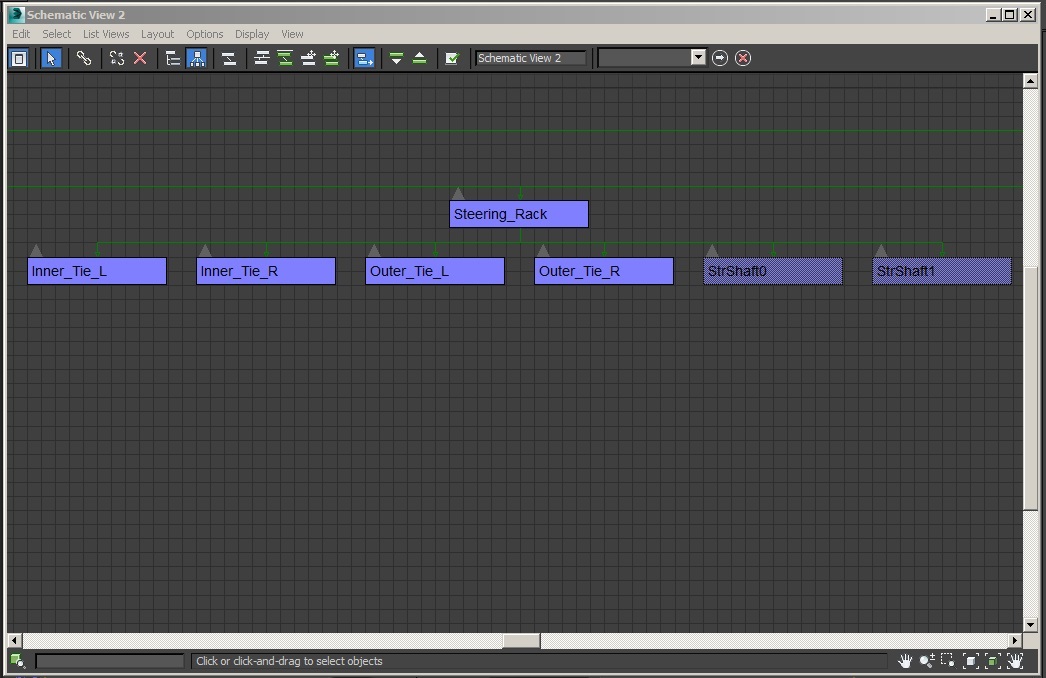
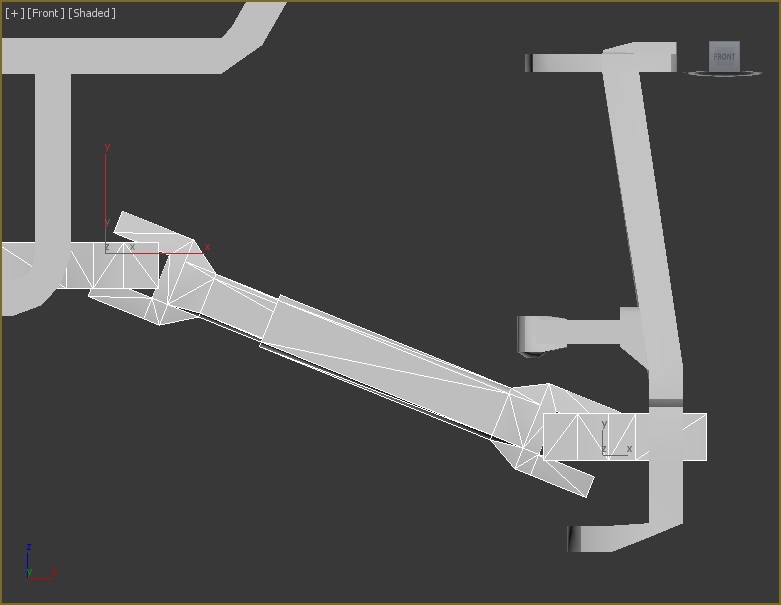
When you've got a vehicle with independent suspension that is powered, the process of depicting the transmission of power from the Differential to the Hub requires a total of four parts, 4 x Driveshaft/s ending with Universal Joints:
- 1 To be attached to the differential
- 1 To be attached to the Hub
- 2 will form the longer driveshaft that will have to move to stay connected (to the above) as the suspension compresses and extends
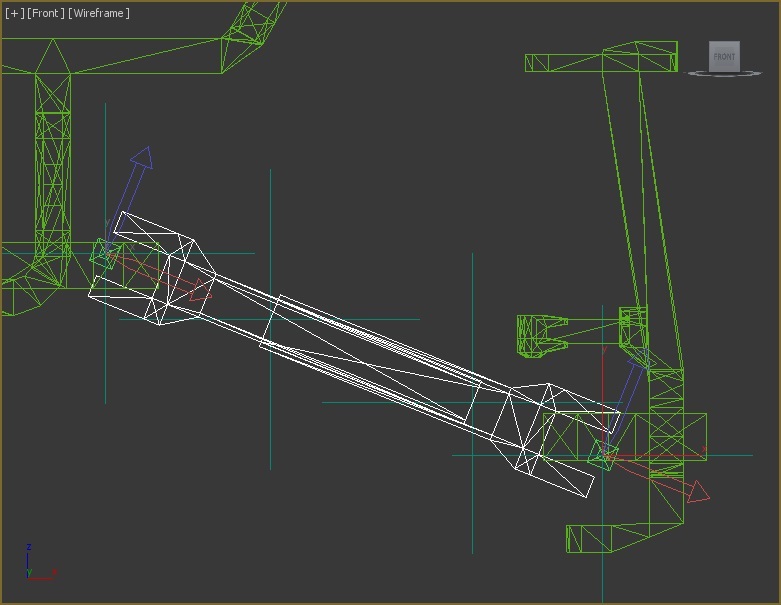
Below you can see a visual representation of these (Wireframes highlighted in white). If the two shafts that form the main driveshaft are at an angle, ideally make sure it is an integer value and keep a record of it, as it will affect the pivot points.
____________________________
The Driveshaft/UJ attached to the differential and the first half of the long driveshaft should be parented to the differential. The other UJ and half of the driveshaft should be parented to the Hub. Do NOT parent driveshafts' to one another, otherwise they will inherit animations from their parent.
____________________________
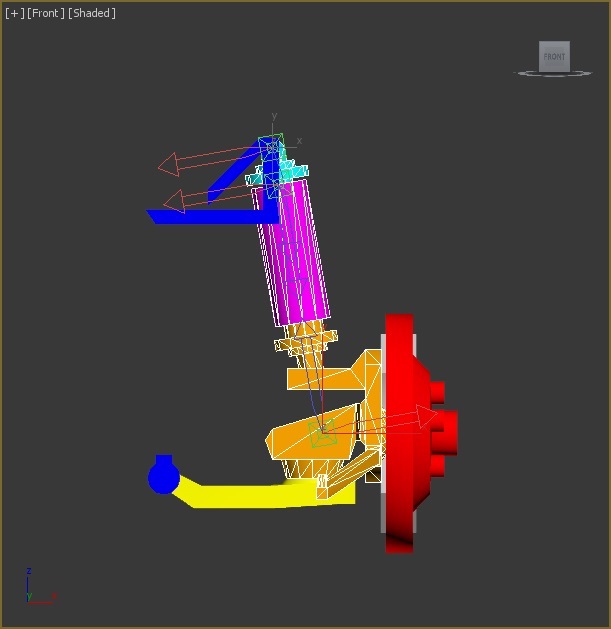
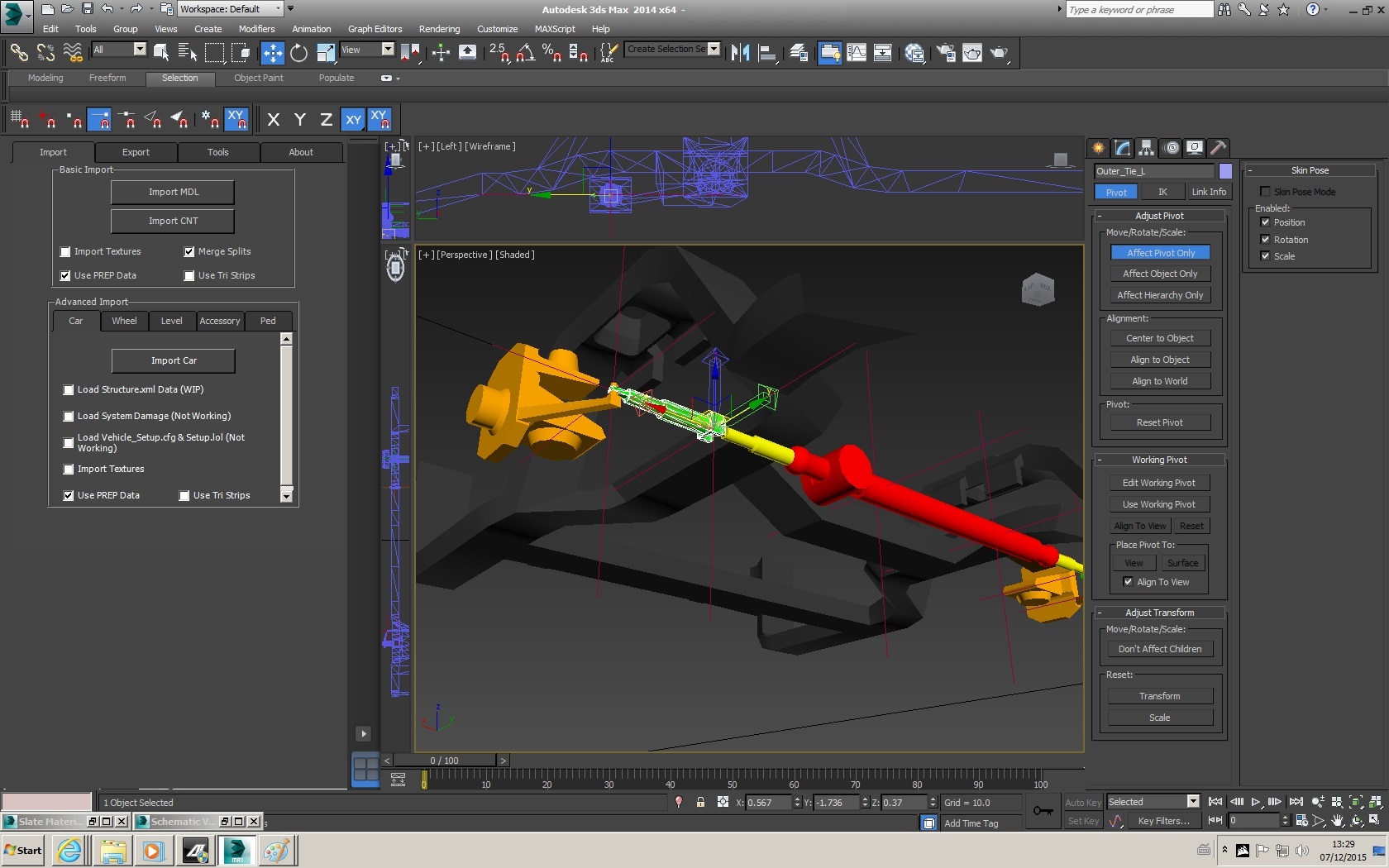
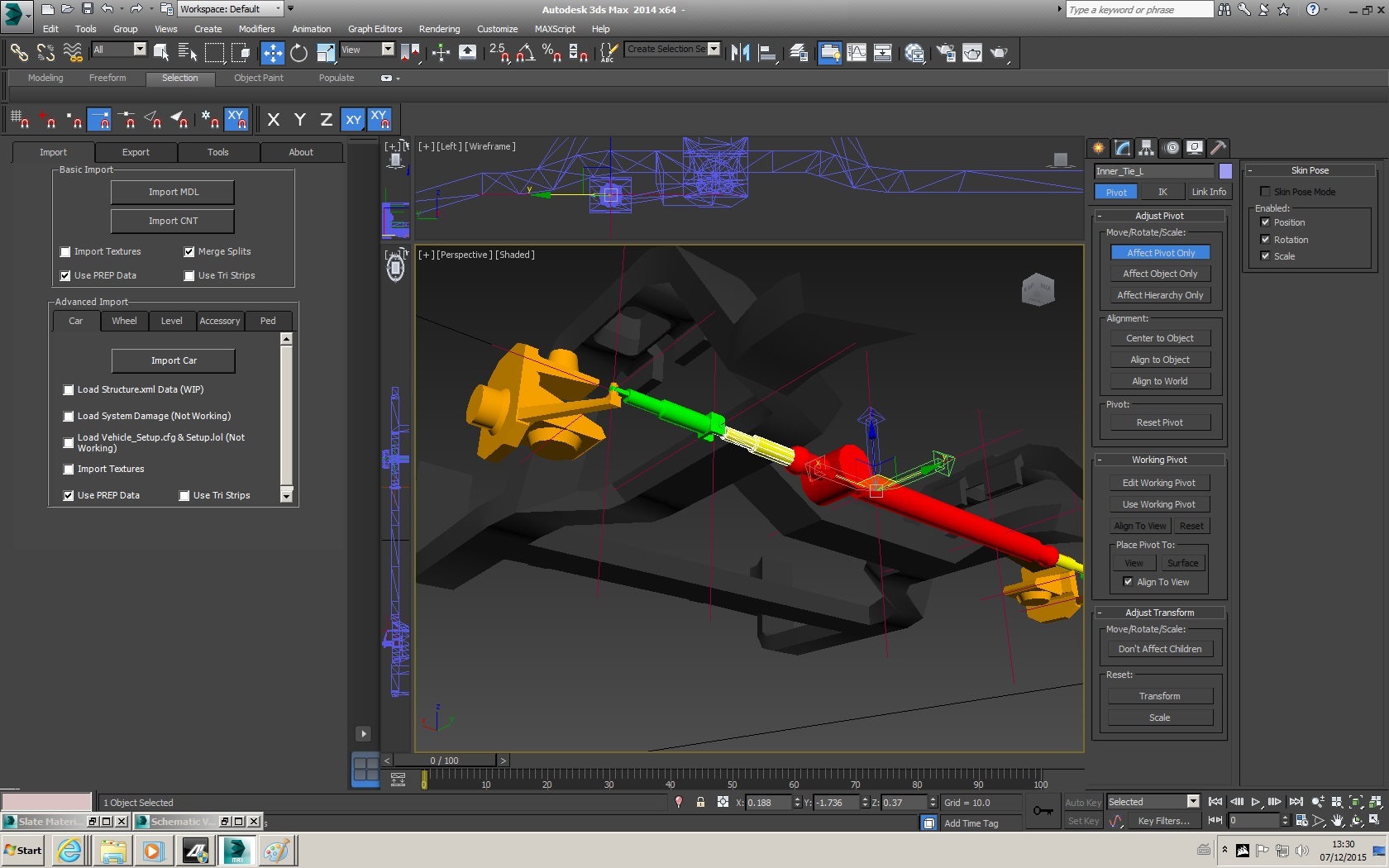
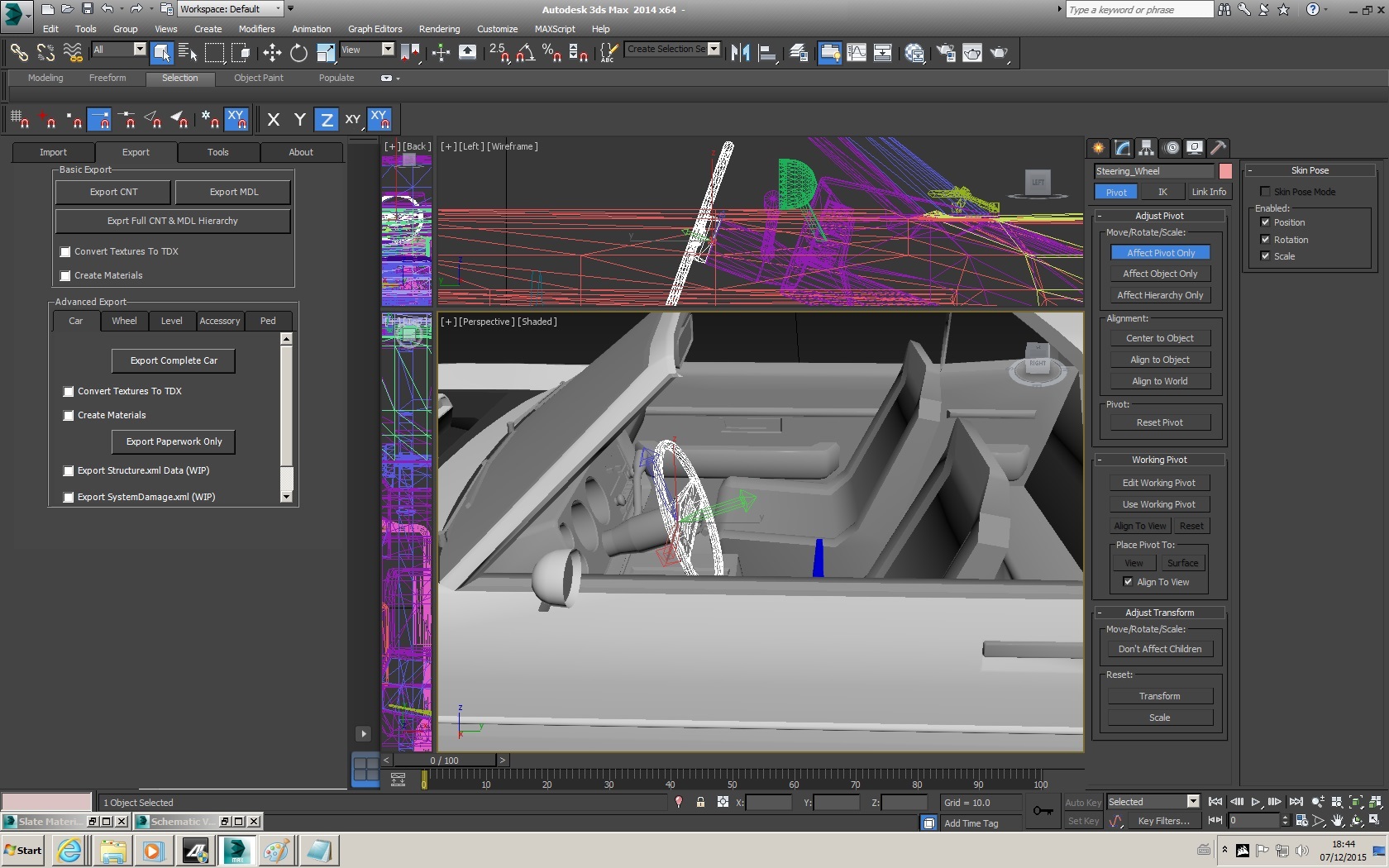
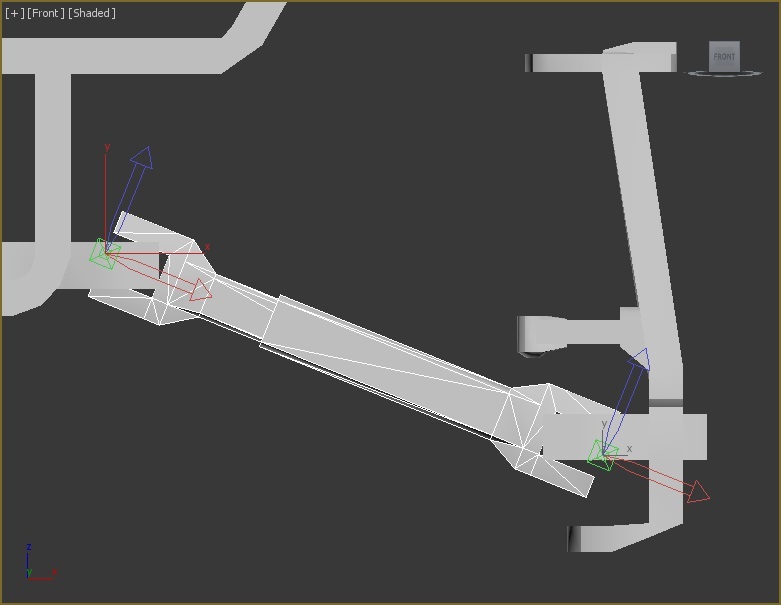
It is very important that the pivot point for all parts are set at the centre of the shafts. For the the two longer driveshaft parts, which may be at an angle, the pivot points must also be rotated by that same value and be set at the end of the shaft where it meets its respective UJ. Below you can see a visual representation of this.
 Driveshaft Rotation Animation
Driveshaft Rotation AnimationIn addition to basic structure data. All four of the these parts will need to be a assigned a 'Standard Animation' (accessed via 'Tools -> 'Car')
- 'Animation Type' should be set to "Rotate"
- 'Local Axis' Should be set to "X"
- 'Controller' should be the relevant "WHEEL_ROTATION_XX" animation controller, where "XX" is the wheel for that corner.
- 'Degree' value should be left at "1.0"
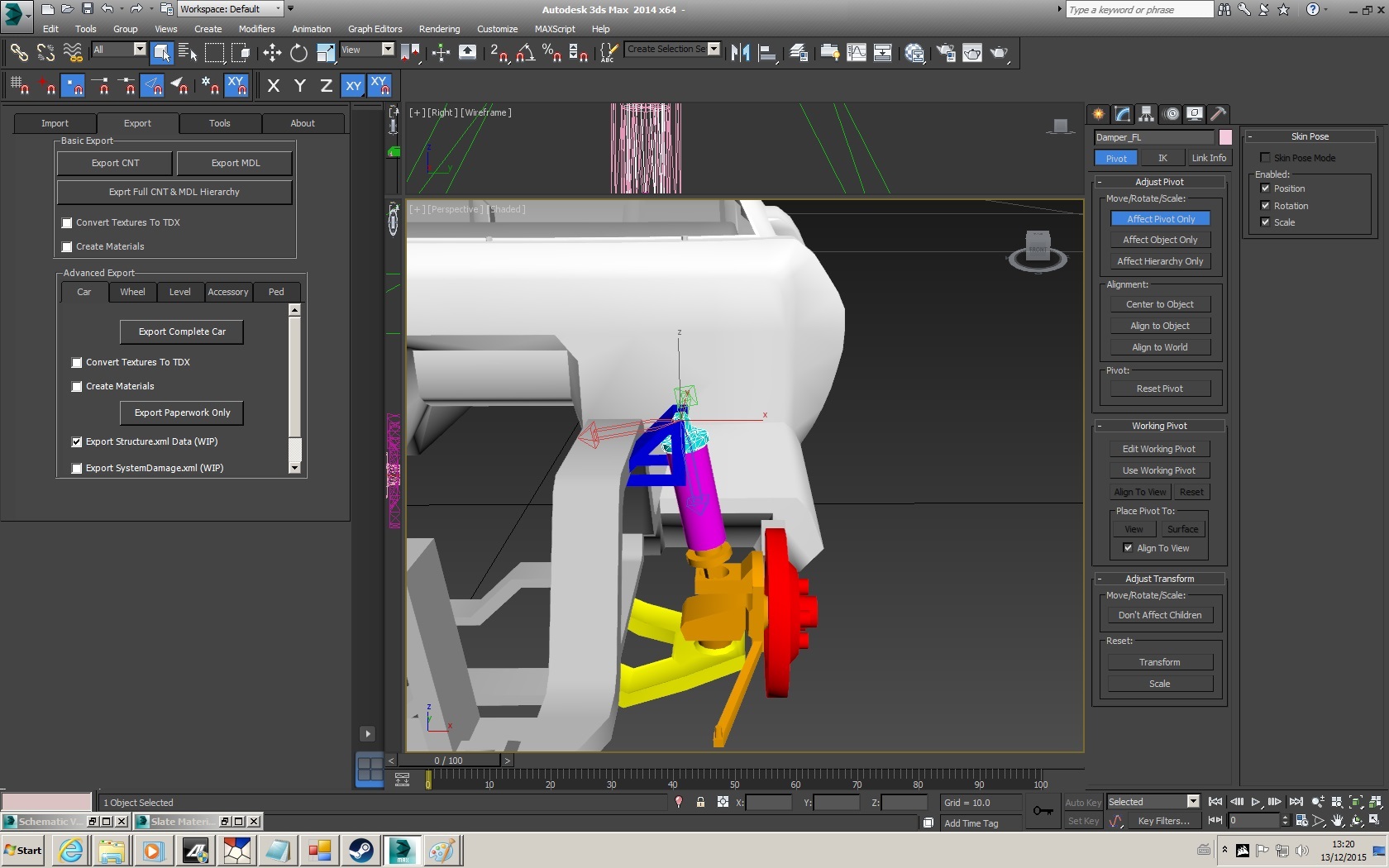
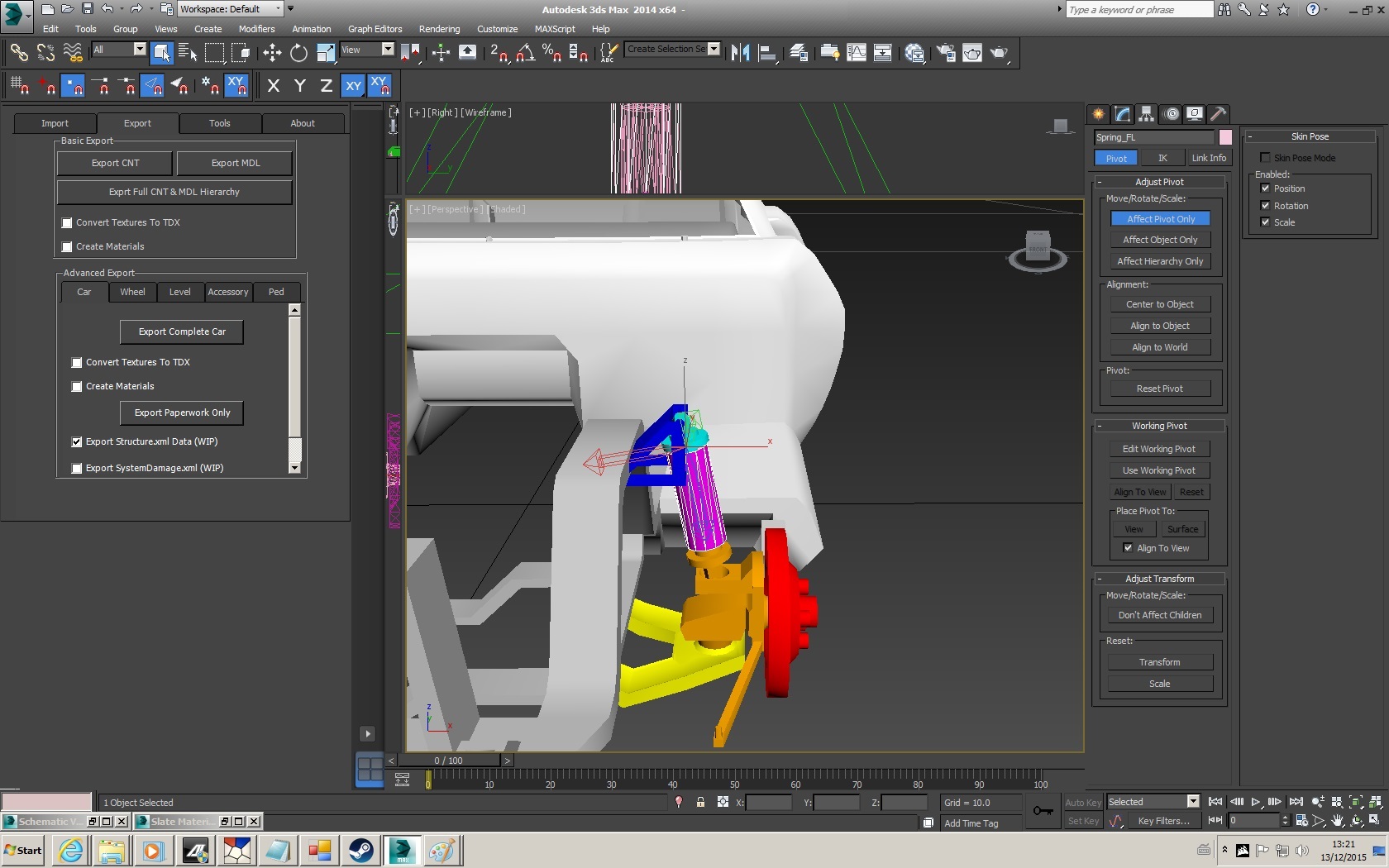
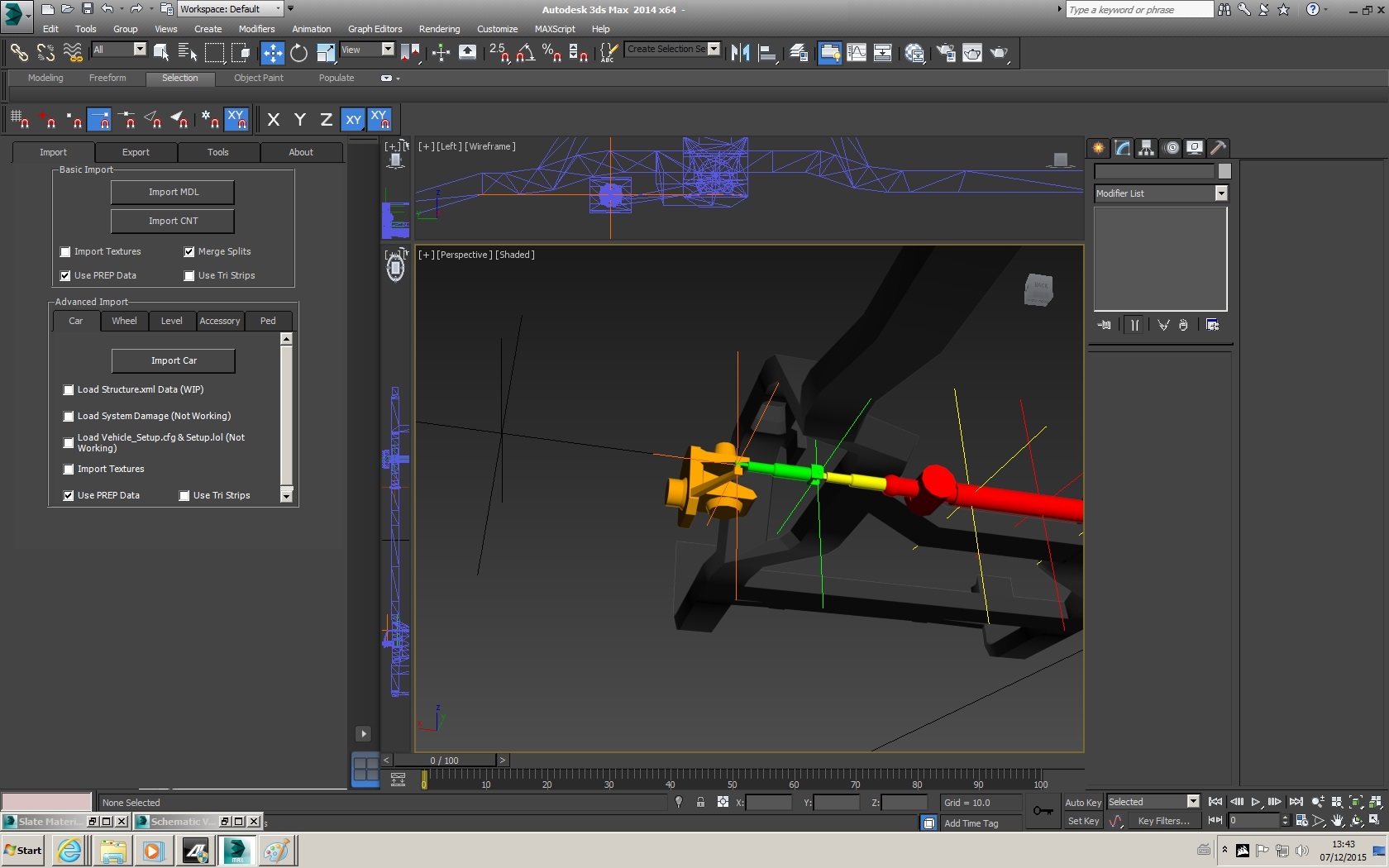
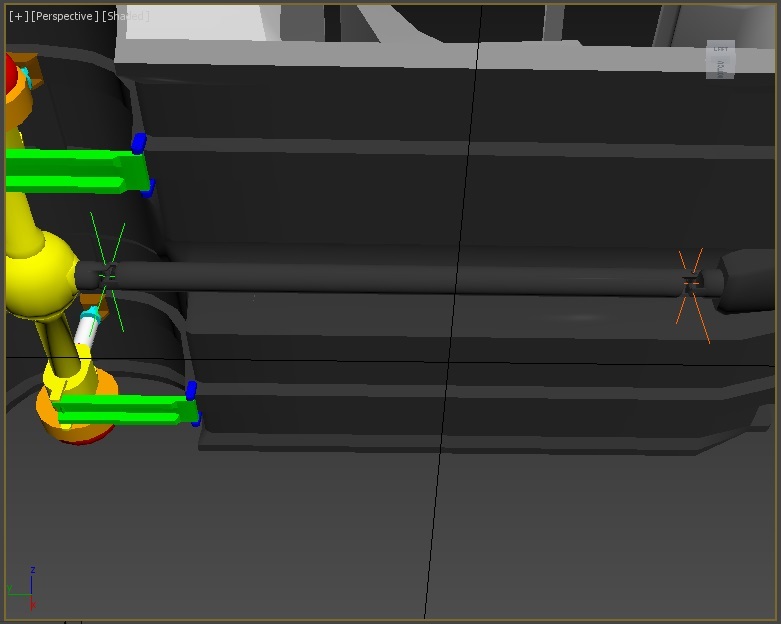
Point-To-Point AnimationFurthermore, the two longer shafts will each need to make use of a 'SnapPointToPointOnOtherPart()' and a 'RotatePointToPointOnOtherPart()' function. Below you can see the position helpers that are going to be used for the 'Point-to-Point Animations'
(Highlighted in Blue). One is at each shafts' pivot-point, the other at each shafts' end point.
The 'Point-To-Point Animation's on each shaft will be set up as follows
- 'SnapPointToPointOnOtherPart()' - Snap Pivot Point of this shaft to UJ at same point
- 'RotatePointToPointOnOtherPart()' - Rotate End Point of this shaft to other half of Driveshaft at its' Pivot Point
Lastly, all four shafts should be welded to their parent parts. The weld vertex/vertices do NOT have to meet an actual vertex on the parent part.
There seems to be a bug in Carmageddon Max Damage, where driveshafts that make use of two point to point functions (Examples: Transmission to Live Axle, or Differential to Hub [Independent suspension]), will not spin, even if configured correctly.